Riemannian metrics
Riemannian metric space
A Riemannian metric space is defined by a continuous metric field in . The length of an edge is computed using the path where :
The figure below shows length computation in different metric spaces. We see that the iso-values of distance in the Riemannian space are "distorted" with the loss of symmetry when compared to the Euclidean spaces.
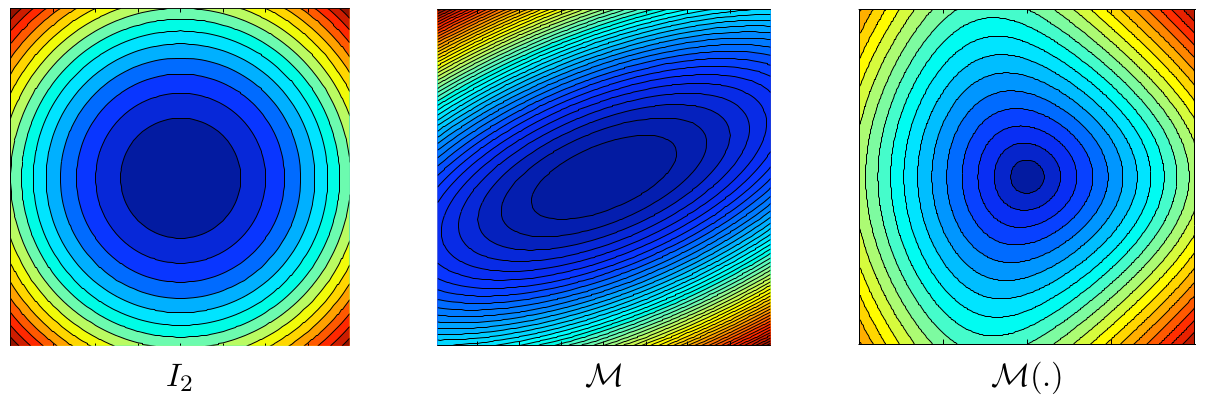
Figure 1: Iso-values of the distance w.r.t canonical Euclidean space (left), euclidean space defined by and Riemannian space defined by (Loseille 2008)
Given a bounded subset of , the volume is given by:
Unit elements and meshes
Let be a simplex element in where denotes its dimension. is unit w.r.t the euclidean metric field when all its edges are equal to 1 in this metric. Mathematically speaking, if we define the list of edges of by , then
And, the volume of is given by:
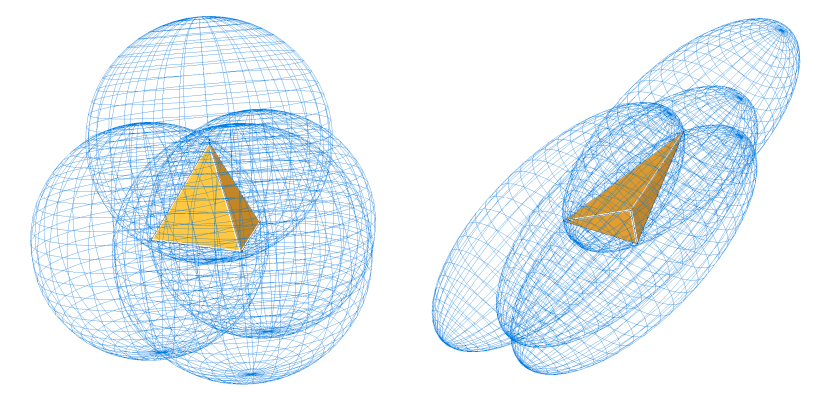
Figure 2: Geometric representation of unit tetrahedrons in metric (left) and an anisotropic metric (right) (Loseille 2008)
The metric for which is unit is unique and referred to as the implied metric of . Conversely, when given a metric , the set of unit elements is not empty. Similarly, the unit notion can be extended to a mesh composed of simplexes with a continuous metric field . The mesh could then be said unit, if all its simplex elements are unit in . However, it is well known that the equilateral tetrahedron does not fill a subset of . Following the proposition in the literature (Loseille 2011), the unit notion for simplex elements is relaxed to the quasi-unit element notion. is said to be quasi-unit if:
Yet, some examples show that elements with a null volume (i.e. degenerated elements) can satisfy the above property. The authors propose a strategy to control the ratio between the volume and the sum of the square length of the edges . This ratio defines the quality function that measures the proximity of to the perfectly unit element in :
The constant is chosen so that is equal to 1 when is perfectly unit in . For a null volume is 0. A constraint on the quality is added to the definition of quasi-unit element to avoid describing degenerated elements.
Then, is said to be quasi-unit if:
Finally, the simplex mesh is said unit with respect to the metric field when all its elements are quasi-unit in . This defines the duality between the discrete and continuous mesh, in the sense that, given a metric field there exists a unit mesh with respect to that metric field .
Complexity
We define the complexity of metric field :
This real value parameter is useful to quantify the global level of accuracy of . It can also be interpreted as the continuous counterpart of the number of vertices of a discrete mesh. There is a direct relationship between the prescribed metric complexity and the number of elements of the generated mesh. Let be a simplex mesh of composed of simplex elements . We can describe this mesh with the metric in which is unit. Then, the continuous mesh complexity and the mesh number of element are linked using the unit element properties:
After remeshing, this relation is not exact because most of the elements are not perfectly unit.
Embedded Riemannian spaces
Two embedded Riemannian spaces have the same anisotropic ratios and orientations. They differ only from their complexity. Mathematically speaking, two Riemannian spaces and are embedded if a constant exists such that:
Conversely, from we can deduce of complexity having the same anisotropic properties (anisotropic orientations and ratios) by considering:
In the context of error estimation, this notion enables convergence order study with respect to an increasing complexity . Consequently, the complexity is also the continuous counterpart of the classical parameter used for uniform meshes while studying convergence.
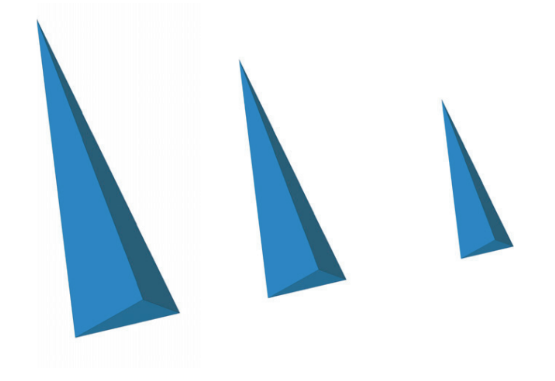
Figure 3: Different unit elements where only the density increases from left to right. (Loseille 2008)
Local decomposition of the metric field in
Let be a metric defined locally on point of domain . Then, by definition, this metric can be written in diagonal form yielding:
In this form, the optimal orientations are given by the rotation matrix and the sizes are given by , given by the eigenvalues . However, we want to write a form that locally decouples the anisotropic information from the global size. Following (Loseille 2011b), the following local parameters can be defined:
- Anisotropic quotients defined as:
- A density defined as:
Locally, the metric writes:
This decomposition is used in the Hessian scaling technique described in the section on Hessian Scaling.
Geometric invariants for unit elements
Unit element's geometric properties can be connected to the linear algebra properties of metric tensors thanks to geometric invariants:
-
Invariant related to the Euclidean volume :
-
Invariant related to the square length of the edges for all symmetric matrix :
Element-implied metric computation
Practically we compute the implied metric by first computing from a two-step transformation. Let be the jacobian transformation matrix from to and be the jacobian transformation matrix from to .
We use the triangle mapping definition to compute and . The element-implied metric becomes:
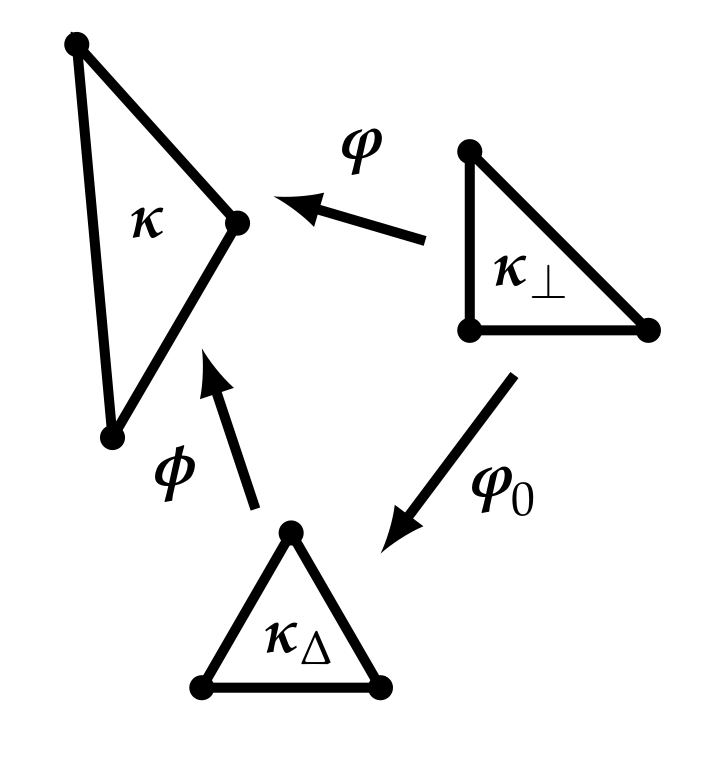
Figure 4: Relationship between the physical and reference elements ( and ) for the calculation of the element-implied metric. (CAPLAN2020102915)
Numerical computation of lengths
Let and be two points of the domain. The length of segment can be numerically approximated using a -points Gaussian quadrature with weights and barycentric coefficients :
where is the metric at the Gauss point. In the context of meshing, we are interested in the evaluation of edge length in the metric. This is a recurrent operation which could be time consuming for the mesh generator. Fortunately, this operation is at the edge level where the metric is known at the endpoints. The problem can thus be simplified by considering a variation law of the metric along the edge and computing analytically the edge length in the metric.
Formally speaking, let be an edge of the mesh of Euclidean length , and and be the metrics at the edge extremities and . We denote by the length of the edge in metric . We assume and we set .
Now, we consider the metric variation law associated with the interpolation operator on metrics.

Logarithmic interpolation is used to interpolate between metrics: as it verifies a maximum principle, i.e. if then for
When interpolating a discrete metric field at is approximated as which is consistent with the assumption of geometric progression of sizes.
Why not linear interpolation?

Linear interpolation between and is given by and does not respect the maximum principle.
As such, logarithmic interpolation is considered along the edge. It can be shown that it is equivalent to a geometric interpolation of the physical length prescribed by the metric F. Alauzet, leading to the following Riemannian distance computation:
Numerical computation of volumes
The evaluation of a tetrahedron volume in a Riemannian metric space consists in computing the volume integral numerically. If a first order approximation in the log-Euclidean framework is considered, we get:
Higher order approximation can be obtained by using Gaussian quadrature. For instance, if one considers a -point Gaussian quadrature with weights and barycentric coefficients , it yields: