Metric
Metric and Euclidean metric space
An Euclidean metric space is a finite-dimensional vector space where the dot product is defined by means of a symmetric definite positive matrix :
The properties of ensure that it defines a dot product. We will now refer to as a metric tensor or metric.
Canonical Euclidean metric space
The most familiar example of Euclidean space is the one defined by an identity matrix. The 2D canonical one is defined by the 2x2 identity matrix and the 3D by the 3x3 identity matrix .
Geometric definitions in Euclidean spaces
The dot product defined by allows to define the distance notion in . In the following denotes the dimension and is equal either to 2 or 3. We can then define norm and distance definitions:
The length of a segment is then given by the distance between its extremities:
Moreover, given a bounded subset of , the volume is given by:
where is the Euclidean volume of .
Finally, as metric tensor is symmetric, it is diagonalizable. It thus admits the following spectral decomposition:
where is an orthonormal matrix composed of the eigenvectors of :
verifying . is a diagonal matrix composed of the eigenvalues of , denoted , which are strictly positive.
Natural metric mapping
The metric can be seen as a mapping from the unit ball of identity matrix onto the unit ball of , where these unit balls are defined as:
Where denotes the vicinity of point . A visual representation of these unit balls is given in Figure 1. Notice that defines the unit circle in 2D and the unit sphere in 3D.
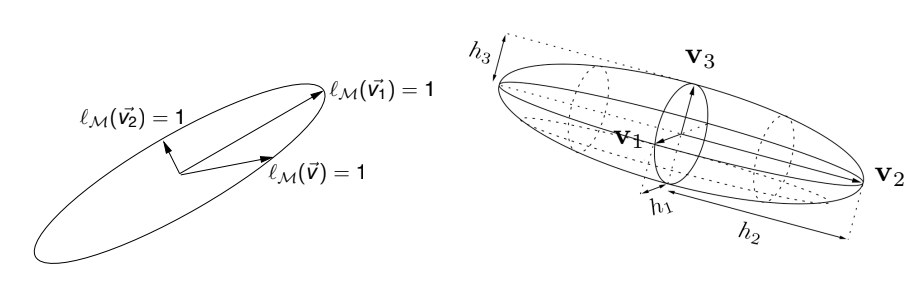
Figure 1: Geometric interpretation of the unit ball of . are the eigenvectors of and are the eigenvalues of . (Loseille 2011)
is defined by the spectral decomposition:
Where denotes a 2D or 3D diagonal matrix. defines the diagonal matrix of the sizes along directions as . This gives the relation between the metric and the size it enforces.
The mapping defined above is written in the form of the following application:
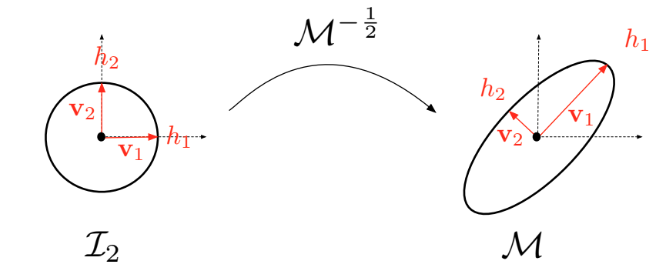
Figure 2: Natural mapping associated with metric . (Loseille 2008)
for more details, see A. Loseille and F. Alauzet, Continuous mesh framework. Part I: well-posed continuous interpolation error, SIAM J. Numer. Anal., Vol. 49, Issue 1, pp. 38-60, 2011. PDF